STA-B0710X is een voor het menselijk oog veilige laserafstandsmeetmodule, die de doelafstand kan detecteren en de gemeten afstand via seriële communicatie naar de bovenste computer kan verzenden. Zichtbaarheid ≥ 15 km, doelreflectiviteit ≥ 0,3, vochtigheid ≤ 80%, het voertuig (2,3 m x 2,3 m NAVO-doel) met een bereik van ≥ 7 km; Gebouw van 7 km oogveilige laserafstandsmetermodule (LRF).
(1) Enkelvoudig bereik en continu bereik;
(2) Reageren op laserafstandscommando's, en kan op elk moment stoppen met bereik volgens het stopcommando;
(3) Voer afstandsgegevens en statusinformatie eenmaal per puls uit tijdens afstandsmeting;
(4) Het kan het cumulatieve aantal verzonden laserpulsen rapporteren (geen stroomverlies);
(5) Afstandsselectie, doelindicatie voor en achter;
(6) Zelftestfunctie.
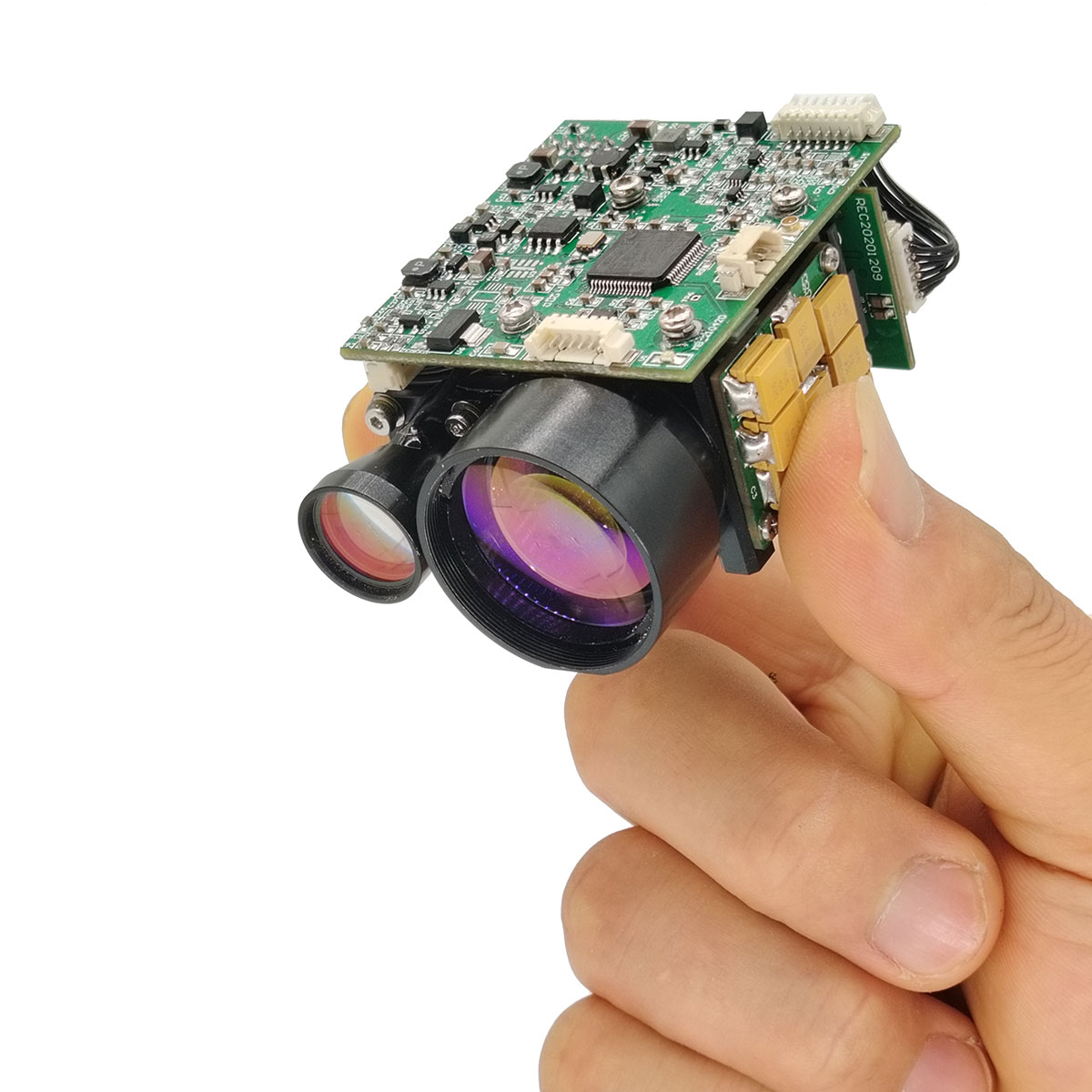
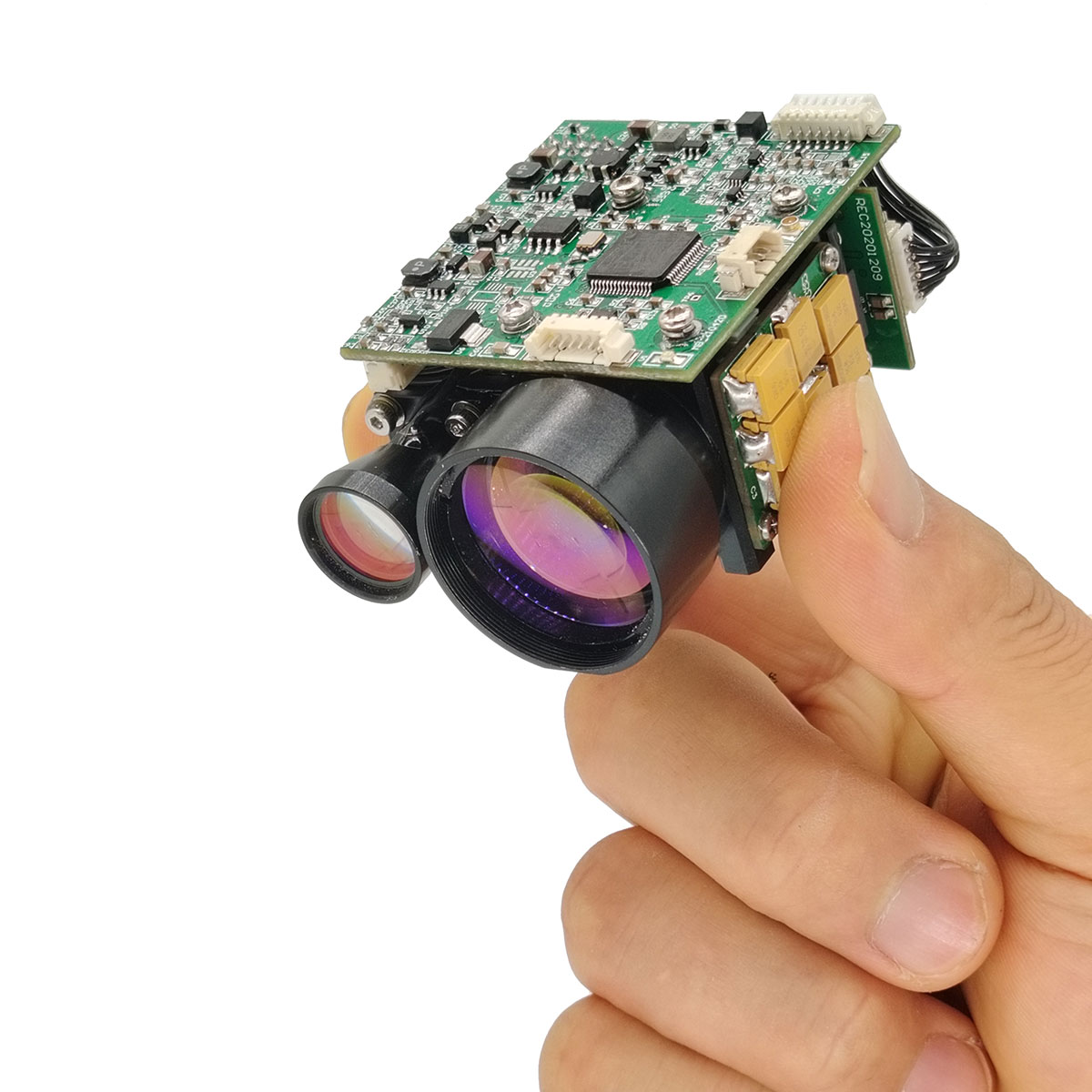
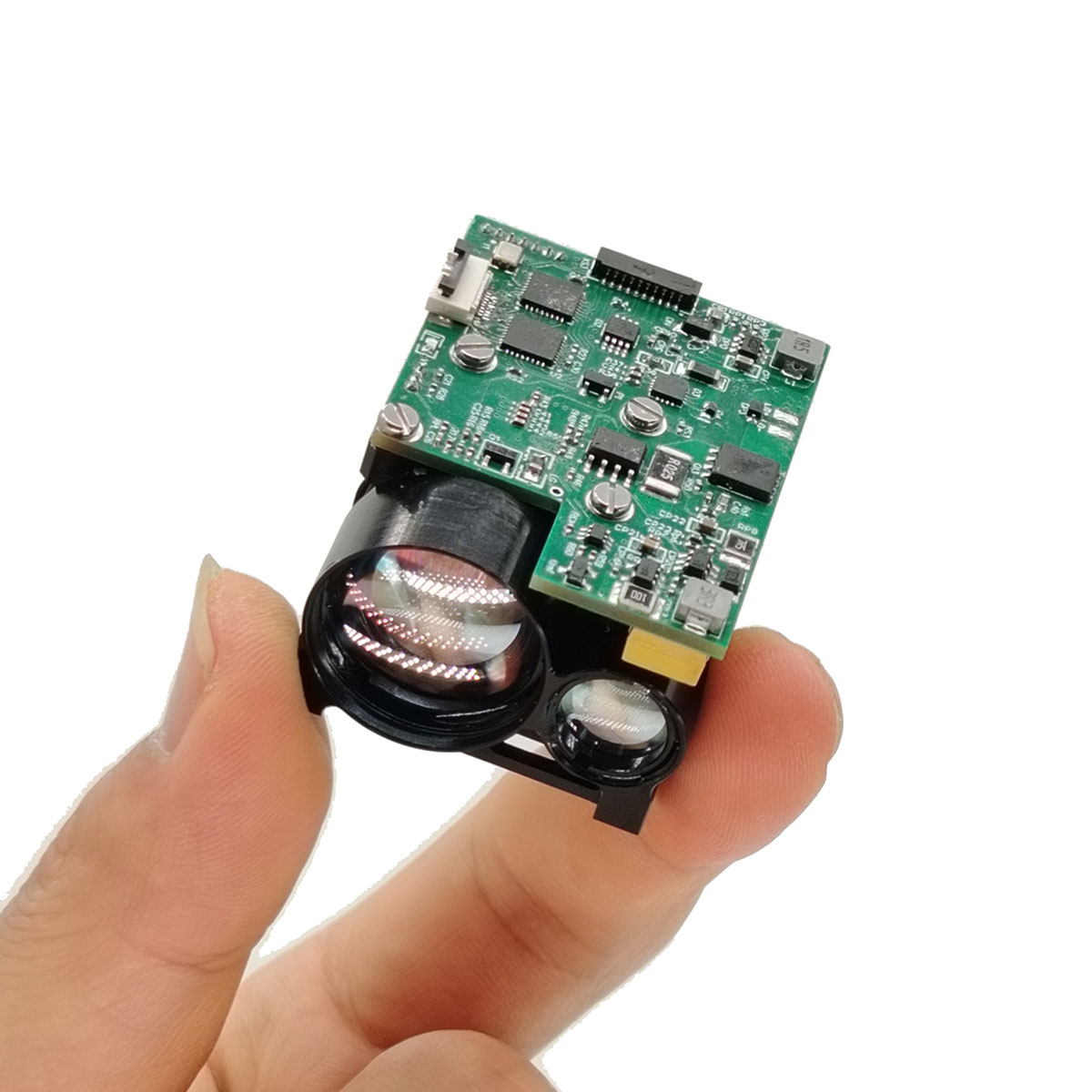
De B0710X laserafstandsmetermodule is een militaire pulslaserafstandsmeter ontworpen voor toepassingsscenario's zoals vliegtuigen, onbemande luchtvoertuigen, tanks en richtkijkers. 7 km oogveilige laserafstandsmetermodule (LRF) heeft een klein formaat, lichtgewicht, laag stroomverbruik, stabiele prestaties, lange meetafstand en lange levensduur, veiligheid van het menselijk oog en andere voordelen. Het is een belangrijke technische uitrusting om de richtnauwkeurigheid van het product te verbeteren.
Productprestatie-index voor B0610X oogveilige LRF-module
| Item | Technische parameter | Instructie |
| Model | STA-B0710X | |
| Werkende golflengte | 1535 ± 5 nm | |
| Veiligheid van de ogen | Klasse 1 (IEC 60825-1) | |
| Ontvangstopening | Φ33mm | |
| Emissie-opening | Φ14mm | |
| Variërend vermogen | 50m-10km | |
| Variërend bereik | ≥14000m | Max. bereik, reflectievermogen: 0,9, zichtbaarheid voor waarnemers 25 km |
| ≥10000m | Doelen bouwen, reflectiviteit: 0,6, zichtbaarheid waarnemer 25 km | |
| ≥7000m | NAVO-doel | |
| ≥4500m | Menselijk doelwit | |
| ≥1500m | UAV-doelwit | |
| Mini-bereik | 50m | |
| Detectie van meerdere doelen | Maximaal 3 doelen | |
| Variërende nauwkeurigheid | ±1m | 3δ |
| Variërende frequentie | 1~10Hz instelbaar | |
| Nauwkeurigheidsgraad | ≥98% | |
| Vals alarmpercentage | 1% | |
| Divergentie hoek | ≤0,3 mrad | |
| Communicatie-interface | RS422 | TTL/RS232-interface kan worden aangepast |
| Spanning | 9~32V | Ingangsspanning kan worden aangepast aan de vereisten |
| Werkende kracht | ≤3W(@10hz) | Normale temperatuurtest |
| Piekvermogen | ≤5W | Normale temperatuurtest |
| Mechanische schok | 75 g, 1 ms | |
| Werktemperatuur | -40℃~+60℃ | |
| Opslagtemperatuur | -45℃~+70℃ | |
| Betrouwbaarheid | MTBF ≥ 1500 uur | |
| Maat | ≤73×45×59mm | |
| Gewicht | ≤133g | |
| Hoofdfunctie | Eerste en laatste doelbereik, Multi-target bereik, Selectiviteit op afstand |
|
Opmerkingen:
1) NAVO-doelgrootte 2,3 mx 2,3 m; Grootte menselijk doelwit 0,5 m × 1,7 m; UAV-doelgrootte 0,2 m × 0,3 m; Reflectiviteit 30%, zichtbaarheid voor waarnemers≥ 15 km

| Pin | Definitie | Functie | Opmerkingen |
| 1 | RX+ | RS422 Ontvanger + | Blauw |
| 2 | RX- | RS422-ontvanger - | Groente |
| 3 | TX- | RS422-transmissie - | Paars |
| 4 | TX+ | RS422 Transmissie + | Geel |
| 5 | GND | Communicatie aardedraad | Wit |
| 6 | VEE | Voeding + | Rood |
| 7 | GND | Voeding - | Zwart |
| 8 | PWR NL | / | As |
Aanpassingsvermogen aan het milieu
a) werktemperatuur:-40℃~+60℃.
b) Opslagtemperatuur:-45℃~+70℃.
C) Willekeurige trillingen:15~2000Hz, 3 richtingen. De specifieke testomstandigheden worden weergegeven in Tabel 1.
Tabel 1 Willekeurige trillingstestomstandigheden
| Serienummer | Frequentiebereik (Hz) | Spectrale dichtheid van versnelling (g2/Hz) | Triltijd (min) |
| 1 | 15~190 | 0.01 | Trillingen in elke richting 15 min |
| 2 | 190~210 | 0.1 | |
| 3 | 210~380 | 0.01 | |
| 4 | 380~420 | 0.025 | |
| 5 | 420~2000 | 0.01 |
OEM/ODM-variërende modules en maatwerkoplossingen
De B0710X is ontworpen voor systeemintegratoren die op zoek zijn naar een handige, krachtige en compacte laserafstandsoplossing. Het biedt betrouwbare prestaties in een breed scala aan toepassingen.
Hij is zeer klein, ultralicht, heeft een laag stroomverbruik en kan over een lange afstand worden gemeten. Het is geschikt voor draagbare apparaten (thermische beeldvorming), toepassingen voor wapenmontage, draagbare systemen en lichtgewicht sensorsuites en onbemande luchtvoertuigen of UGV's.
1. Transmissieprotocol: asynchrone seriële communicatie;
2. Haventarief: 115200;
3. Databits: 10 bits: één startbit, 8 databits, één stopbit, ongeldige verificatie;
4. Datastructuur: De data bestaan uit de headerbyte, het commandogedeelte, de datalengte, het parametergedeelte en de controlebyte;
5. Communicatiemodus: de hoofdbesturing verzendt besturingsopdrachten naar de afstandsmachine, en de afstandsmachine ontvangt en voert de instructies uit. In de afstandsstatus stuurt de afstandsmachine gegevens en de status van de afstandsmachine terug naar de bovenste computer volgens de afstandscyclus. Het communicatieformaat en de opdrachtinhoud worden weergegeven in de volgende tabel.
A) Hoofdbediening verzendt
Het formaat van het te verzenden bericht is als volgt:
| STX0 | CMD | LEN | DATA1H | DATA1L | CHK |
Tabel 2 Formaatbeschrijving van het verzonden bericht
| bestelnummer | naam | uitleggen | code | opmerkingen |
| 1 | STX0 | Startvlag voor bericht | A5(H) | |
| 2 | CMD | CW | Zie tabel 3 | |
| 3 | LEN | DL | Het aantal bytes behalve het startteken, het opdrachtwoord en de controlesom | |
| 4 | DATAH | parameter | Zie tabel 3 | |
| 5 | DATAL | |||
| 6 | CHK | XOR-verificatie | Behalve de geldige byte worden alle andere bytes XORed |
De opdracht wordt als volgt beschreven:
Tabel 3 Beschrijving van commando's en datawoorden die door de master naar de afstandsmachine worden verzonden
| bestelnummer | CW | functie | gegevensbyte | opmerkingen | lengte | Voorbeeldcode |
| 1 | 0x00 | ophouden | DATAH=00 (H) DATAAL=00 (H) |
De afstandsmeter stopt met meten | Zes bytes | A5 00 02 00 00 A7 |
| 2 | 0x01 | Enkel bereik | DATAH=00 (H) DATAAL=00 (H) |
Zes bytes | A5 01 02 00 00 A6 | |
| 3 | 0x02 | Continu bereik | DATAH=XX (H) DATAL=JJ(H) |
DATA beschrijft de bereikperiode, in ms | Zes bytes | A5 02 02 03 E8 4E (1 Hz bereik) |
| 4 | 0x03 | zelfcontrolerend | DATAH=00 (H) DATAAL=00 (H) |
Zes bytes | A5 03 02 00 00 A4 | |
| 5 | 0x04 | Stel de dichtstbijzijnde afstand tot de selectie in | DATAH=XX (H) DATAL=JJ(H) |
DATA beschrijft de blinde zonewaarde, eenheid 1m | Zes bytes | A5 04 02 00 64 C7 (100m is de dichtstbijzijnde afstand) |
| 6 | 0x06 | Cumulatief aantal lichte uitvoerquery's | DATAH=00 (H) DATAAL=00 (H) |
Cumulatief aantal lichte uitvoerquery's | Zes bytes | A5 06 02 00 00 A1 |
| 7 | 0x11 | APD-stroom is ingeschakeld | DATAH=00 (H) DATAAL=00 (H) |
Zes bytes | A5 11 02 00 00 B6 | |
| 8 | 0x12 | APD-stroom is uitgeschakeld | DATAH=00 (H) DATAAL=00 (H) |
Zes bytes | A5 12 02 00 00 B5 | |
| 9 | 0xEB | Nummer opvragen | DATAH=00 (H) DATAAL=00 (H) |
Nummer opvragen | Zes bytes | A5 EB 02 00 00 4C |
a) Hoofdbediening ontvangt formaat
Het formaat van het ontvangen bericht is als volgt:
| STX0 | CMD | LEN | DATAn | GEGEVENS0 | CHK |
Tabel 4 Formaatbeschrijving van ontvangen berichten
| bestelnummer | naam | uitleggen | code | opmerkingen |
| 1 | STX0 | Beginvlag bericht 1 | A5 (H) | |
| 2 | CMD_JG | Gegevenscommandowoord | Zie tabel 5 | |
| 3 | LEN | DL | Het aantal bytes behalve het startteken, het opdrachtwoord en de controlesom | |
| 4 | Dn | parameter | Zie tabel 5 | |
| 5 | D0 | |||
| 6 | CHK | XOR-verificatie | Behalve de geldige byte worden alle andere bytes XORed |
Hoofdbediening ontvangststatusbeschrijving:
Tabel 5 beschrijft het datawoord dat door de afstandsmeter naar de mastercontroller wordt verzonden
| bestelnummer | CW | functie | gegevensbyte | opmerkingen | totale lengte |
| 1 | 0x00 | ophouden | D1=00 (H) D0=00 (H) |
Zes bytes | |
| 2 | 0x03 | zelfcontrolerend | D8~D1 | D8-D7: -5V spanning, eenheid 0,01V. D6-D5: Dodehoekwaarde, eenheid 1m D4: APD-hoogspanningswaarde, eenheid V; D3: char-type, dat de APD-temperatuur aangeeft, eenheid: graden Celsius; D2-D1: +5V spanning, eenheid 0,01V |
12 bytes |
| 3 | 0x04 | Afstand tot de dichtstbijzijnde toegangsinstelling, eenheid m | D1 D0 | DATA beschrijft de dichtstbijzijnde afstandswaarde, eenheid 1m; Begin hoog en eindig laag |
Zes bytes |
| 4 | 0x06 | Cumulatief aantal lichte uitvoerquery's | D3~D0 | DATA drukt het aantal lampjes uit, 4 bytes, met de hoge byte eerst | Zeven bytes |
| 5 | 0x11 | APD-stroom is ingeschakeld | D1=00 (H) D0=00 (H) |
APD-stroom is ingeschakeld | Zes bytes |
| 6 | 0x12 | APD-stroom uitgeschakeld | D1=00 (H) D0=00 (H) |
APD-stroom is uitgeschakeld | Zes bytes |
| 7 | 0xED | Overuren maken | 0x00 0x00 | De laser staat onder laserwerkbescherming en kan niet worden gemeten. | Zes bytes |
| 8 | 0xEE | Effectiviteitsfouten | 0x00 0x00 | Zes bytes | |
| 9 | 0XEF | Time-out voor seriële poortcommunicatie | 0x00 0x00 | Zes bytes | |
| 10 | 0x01 | Meting met enkel bereik (enkel doel, nul voor het tweede en derde doel, nul voor het derde doel aan het begin en einde van het doel) | D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 |
D8-D6 eerste doelafstand (eenheid 0,1 m) D5-D3 afstand tot het tweede doel (eenheid: 0,1 m) D2-D0 derde doelafstand (eenheid 0,1 m) 3. Doelen zijn van dichtbij tot ver weg D9 (bit7-bit0) vlagbyte: D9 is de 7e positie die de hoofdgolf aangeeft; 1: er is een hoofdgolf, 0: geen hoofdgolf. D9 is de 6e positie die de echo aangeeft; 1: er is echo, 0: geen echo D9 De vijfde positie geeft de laserstatus aan; 1: normale laser, 0: laserfout D9 is het vierde bit van de time-outvlag, 1: normaal, 0: time-out D9 is ongeldig op de 3e positie (ingesteld op 1); D9 De tweede positie geeft de APD-status aan; 1: normaal, 0: fout D9 is de eerste positie die aangeeft of er een eerder doel is; 1: er is een vorig doel, 0: geen vorig doel (doel in het blinde gebied). D9 Het 0-de bit geeft aan of er een volgend doel is; 1: er is een vervolgdoel, 0: geen vervolgdoel (het doel na het hoofddoel is het vervolgdoel) |
14 bytes |
| 11 | 0x02 | Continu bereik (enkel doel, nul voor het tweede en derde doel, nul voor het derde doel aan het begin en einde van het doel) | D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 |
D8-D6 eerste doelafstand (eenheid 0,1 m) D5-D3 afstand tot het tweede doel (eenheid: 0,1 m) D2-D0 derde doelafstand (eenheid 0,1 m) 3. Doelen zijn van dichtbij tot ver weg D9 (bit7-bit0) vlagbyte: D9 is het zevende bit dat de hoofdgolf aangeeft; 1: er is een hoofdgolf, 0: geen hoofdgolf. D9 is de 6e positie die de echo aangeeft; 1: er is echo, 0: geen echo D9 De vijfde positie geeft de laserstatus aan; 1: normale laser, 0: laserfout D9 is het vierde bit van de time-outvlag, 1: normaal, 0: time-out D9 is ongeldig op de 3e positie (ingesteld op 1); D9 De tweede positie geeft de APD-status aan; 1: normaal, 0: fout D9 is de eerste positie die aangeeft of er een eerder doel is; 1: er is een vorig doel, 0: geen vorig doel (doel in het blinde gebied). D9 Het 0-de bit geeft aan of er een volgend doel is; 1: er is een vervolgdoel, 0: geen vervolgdoel (het doel na het hoofddoel is het vervolgdoel) |
14 bytes |
| 12 | 0xEB | Nummer opvragen | D17…… D0 | D17 D16 D15 D14 D13 D12 Modelcode van de hele machine D11D10 Productnummer D9 D6-softwareversie D5 D4 APD-nummer D3 D2 Lasernummer Versie D1 van FPGA |
22 bytes |
| Opmerking: ① Ongedefinieerde databyte/bit, standaard is 0; | |||||
Voor meer informatie over onze producten kunt u contact opnemen met Jioptik.